RESEARCH ARTICLE
An IoT-Based Soil Quality Monitoring and Automated Irrigation System for Open-Field Tomato Cultivation
Digital System and Computing|Vol. 2, Issue 1, pp. 9-18 (2026)
CC BY 4.0-2026 Authors
Views
Downloads
Shares
Received
Jan 21, 2026Revised
Mar 27, 2026Accepted
May 8, 2026Published
May 20, 2026
Abstract
Open-field tomato cultivation is vulnerable to environmental fluctuations, yet manual monitoring often leads to inaccurate decisions. This study aims to design and validate a low-cost Internet of Things (IoT)-based soil quality monitoring prototype, addressing the gap in accessible real-time alert systems for small-scale farming. The system integrates a NodeMCU ESP8266 with soil moisture, temperature (DS18B20), air humidity (DHT11), and pH sensors, visualized via Blynk and Telegram. Conducted over 14 d with nine experimental units across three soil media (clay, sandy, and humus), the study focused on technical prototype validation. Results indicate the system monitored moisture levels (43–47%) and temperatures (≈30.3 °C) with high reliability. Automated irrigation activated at ≈60% and deactivated at 80% moisture, maintaining an uptime of ≥95%. Sensor verification showed temperature deviations below ±1 °C. Unlike existing greenhouse-centric models, this work implements a multi-parameter sensing framework tailored for open-field conditions using affordable hardware. While this study successfully validates the prototype's operational stability and data synchronization, it is primarily a technical verification; further research is required to evaluate agronomic impacts such as yield and water-use efficiency.
Keywords:
Introduction
Tomato (Solanum lycopersicum L.) cultivation in open-field environments is highly sensitive to fluctuations in soil and ambient conditions, particularly soil moisture, temperature, and pH, which directly influence plant growth, yield, and quality. In many developing agricultural systems, including small and medium-scale farming, environmental monitoring is still predominantly performed using manual observation and periodic measurements. Such conventional approaches are time-consuming, labor-intensive, and prone to human error, often resulting in delayed or suboptimal agronomic decisions. As a consequence, crops are exposed to stress conditions such as drought, excessive moisture, or unsuitable temperature ranges, which can significantly reduce productivity and increase the risk of crop failure (1).
The urgency of addressing this problem is amplified by increasing climate variability, irregular rainfall patterns, and rising temperatures that disrupt traditional farming calendars. Tomatoes require relatively narrow optimal ranges of soil moisture (approximately 60–80%) and temperature (24–28 °C) to ensure efficient nutrient uptake and physiological development (2). However, these thresholds are not universally fixed, as they may vary depending on cultivar characteristics, soil type, and local climatic conditions (3). Empirical studies have reported that deviations from these thresholds can lead to reduced photosynthetic efficiency, impaired root development, and yield losses exceeding 20–30% in open-field conditions (4). Despite the growing availability of digital technologies, many farmers still lack access to real-time environmental data, making rapid and evidence-based interventions difficult to implement. This gap highlights the critical need for a scalable, affordable, and real-time monitoring solution capable of supporting precision agriculture practices (5).
Recent advancements in Internet of Things (IoT)-based agricultural monitoring systems have demonstrated significant potential in improving resource efficiency and crop management. Several international studies have developed smart irrigation systems integrated with wireless sensor networks, cloud computing, and decision-support algorithms (6). Most of these systems, however, were primarily designed for greenhouse or semi-controlled agricultural environments, where environmental variables can be regulated more consistently. In such conditions, sensor performance, irrigation scheduling, and network stability tend to be more predictable than in open-field cultivation systems (7). Furthermore, previous IoT-based irrigation studies generally emphasize automatic irrigation control as the primary objective, while environmental monitoring functions are often treated as secondary features. As a result, several important cultivation parameters, such as simultaneous monitoring of soil moisture, soil temperature, and air humidity, are not comprehensively integrated into a single monitoring framework (8, 9).
In addition, many existing low-cost IoT prototypes rely on single-platform monitoring without incorporating real-time notification mechanisms capable of supporting rapid farmer intervention under fluctuating field conditions. Some studies also report limitations related to unstable connectivity, limited scalability, and insufficient evaluation under open-field environmental variability. Compared with previous systems, the present study integrates multi-parameter sensing, cloud-based visualization through Blynk, and Telegram-based instant notifications within a unified low-cost architecture specifically implemented for open-field tomato cultivation. Unlike greenhouse-oriented systems that operate under relatively controlled conditions, this study evaluates the operational reliability of the monitoring framework in outdoor environments exposed to dynamic temperature and moisture fluctuations. Therefore, the proposed system contributes not only as an irrigation automation tool, but also as an accessible real-time environmental decision-support system tailored for small-scale farming applications.
To address these questions, this study proposes an Internet of Things (IoT)-based soil quality monitoring system that integrates NodeMCU ESP8266 with soil moisture, temperature (DS18B20), and air humidity (DHT11) sensors, supported by real-time visualization via the Blynk platform and automated notifications through Telegram. The novelty of this work lies in its implementation within an open-field tomato cultivation context, combining real-time monitoring, remote accessibility, and decision-support features in a single low-cost system. The objectives of this study are to: (1) design and develop the proposed monitoring system, (2) evaluate sensor accuracy and system reliability, and (3) evaluate its operational capacity to provide real-time data for decision support. The methodological approach involves system prototyping, sensor calibration, real-time data transmission, and experimental validation under controlled field conditions.
Methodology
Study Design and Rationale
This study employed an experimental system development design grounded in engineering-based research and development (R& D), with the primary objective of designing, implementing, and validating an Internet of Things (IoT)-based soil quality monitoring system for open-field tomato cultivation. An experimental approach was selected to allow iterative prototyping, functional verification, and performance evaluation of both hardware and software components under real operational conditions. This design enables direct observation of system responsiveness, sensor accuracy, and data transmission reliability, which are critical parameters in real-time agricultural monitoring systems (8).
To strengthen evaluation rigor, this study defined explicit quantitative performance criteria for system success, including: (1) sensor accuracy with acceptable error thresholds of ≤5% for soil moisture and ≤1 °C for temperature measurements; (2) system response time of ≤5 s for data transmission and actuation; (3) communication reliability with ≥95% successful data delivery to the Blynk platform and Telegram notifications; and (4) system operational stability (uptime) of ≥95% during continuous operation. These criteria were used as benchmarks for validating system performance.
The study was conducted at a controlled outdoor test site using potted tomato plants to simulate open-field conditions while maintaining experimental repeatability. The use of controlled potted environments was intended to reduce environmental noise and allow consistent comparison across treatments while still exposing the system to natural climatic variability.
Study Object, Sampling, and Experimental Units
The experimental units consisted of tomato plants (Solanum lycopersicum L.) cultivated in three different soil media representing distinct physical characteristics: clay-based soil, sandy soil, and humus-rich soil. Each soil type was placed in identical planting containers to minimize geometric and volumetric bias. These soil media were selected to evaluate the robustness of the monitoring system across heterogeneous soil moisture retention properties, which are known to significantly influence sensor readings and irrigation decisions (4).
To improve experimental rigor, each soil treatment was replicated three times, resulting in a total of nine experimental units. The experiment was conducted over a continuous observation period of 14 d, with sensor data recorded at regular intervals. This repeated-measurement design enabled temporal validation of system consistency and reliability.
Although the study primarily follows an engineering validation approach, the inclusion of replication and temporal observation enhances the reliability of findings. However, it is acknowledged that the use of potted plants introduces ecological and environmental limitations compared to full-scale open-field cultivation. Potted environments may not fully represent natural field conditions because root expansion, soil heterogeneity, water infiltration dynamics, and microclimatic interactions are more restricted and controlled than in actual agricultural land. Consequently, the observed soil moisture fluctuations and irrigation responses may differ from those occurring under large-scale field conditions exposed to natural rainfall variability, wind, and deeper soil profiles. Nevertheless, the use of controlled potted environments was intentionally selected to minimize external variability, maintain experimental repeatability, and facilitate prototype validation during the early-stage development of the IoT monitoring system. Further large-scale field implementation is therefore recommended to evaluate long-term system adaptability and agronomic performance under real cultivation conditions.
Materials, Hardware, and Software Configuration
The system architecture comprised sensing, processing, communication, and actuation layers. The primary hardware components included a NodeMCU ESP8266 microcontroller with integrated Wi-Fi capability, a DS18B20 digital temperature sensor for soil temperature measurement, a DHT11 sensor for ambient temperature and humidity monitoring, an analog soil moisture sensor, a single-channel relay module, and a DC water pump for irrigation control. Supporting components included a 16×2 LCD display with I2C interface, power supply modules, and standard prototyping accessories. A comprehensive list of tools and materials used in system development is provided in Table 1, while consumable tools required during assembly are detailed in Table 2. On the software side, the system firmware was developed using the Arduino IDE, integrating relevant libraries such as OneWire and DallasTemperature for DS18B20 communication, as well as Wi-Fi and Blynk libraries for cloud connectivity. The Blynk platform served as the primary mobile dashboard, while Telegram Bot API was employed for automated alert notifications.
In addition, reference measurement tools (standard thermometer and soil moisture reference meter) were used during calibration and validation processes to ensure measurement accuracy.
| No. | Material/Equipment | Specification/Description | Function |
|---|---|---|---|
| 1 | NodeMCU ESP8266 | Microcontroller with integrated Wi-Fi | Main system controller and data transmitter |
| 2 | Soil Moisture Sensor | Soil Moisture Sensor V1.2 (analog) | Measures soil moisture level |
| 3 | DS18B20 Temperature Sensor | Digital temperature sensor with 1-Wire communication | Measures soil temperature |
| 4 | DHT11 Sensor | Air temperature and humidity sensor | Measures air temperature and humidity |
| 5 | Soil pH Sensor | Analog pH probe | Measures soil acidity or alkalinity |
| 6 | LCD 16×2 with I2C Module | Character display screen | Displays sensor reading data |
| 7 | Single-Channel Relay | Electronic switching module | Controls activation and deactivation of the water pump |
| 8 | Mini DC Water Pump | 3–12 V DC | Automatically irrigates plants |
| 9 | Breadboard | Medium size | Temporary circuit assembly medium |
| 10 | Jumper Wires | Male-to-Male / Female-to-Male | Connects electronic components |
| 11 | Power Supply | 5 V adapter or USB power bank | Provides power to the system |
| 12 | Plant Pots | Medium size (3 units) | Planting media for three soil types |
| 13 | Clay Soil | Mineral-rich soil type | Experimental planting medium |
| 14 | Sandy Soil | Fast-draining soil type | Experimental planting medium |
| 15 | Humus Soil | Loose soil rich in organic matter | Experimental planting medium |
| 16 | Tomato Plant | Local tomato variety seedling | Observation object |
| No. | Tool/Material | Function |
|---|---|---|
| 1 | Solder Wire | Used as a conductive material during the soldering process to connect components to the circuit board |
| 2 | Soldering Iron | Used to join electronic components to a PCB or wires |
| 3 | Cutter | Used to cut cables or tidy up assembled circuits |
| 4 | Hot Glue | Used to secure components to the mounting surface to prevent loosening or displacement |
| 5 | Acrylic Board | Used as a base or mounting platform to keep components neatly arranged and stable |
System Architecture and Operational Procedures
System operation followed a cyclic workflow initiated upon power activation of the NodeMCU ESP8266. After hardware and software initialization, the system performed sequential sensor readings at predefined intervals. Soil moisture data were acquired as analog values and normalized to percentage scale through calibration against dry (0%) and saturated (100%) soil reference conditions. Soil temperature readings were obtained digitally from the DS18B20 sensor with a resolution of 0.0625 °C, while ambient temperature and relative humidity were measured using the DHT11 sensor.
All sensor data were displayed locally on the LCD and simultaneously transmitted via Wi-Fi to the Blynk cloud server for remote visualization. Threshold-based logic was implemented within the microcontroller firmware to evaluate environmental conditions in real time. When soil moisture levels dropped below the predefined lower threshold (approximately 60%), the relay module was activated to power the irrigation pump; irrigation was automatically terminated once moisture levels exceeded the upper threshold (approximately 80%), preventing overwatering.
To provide a baseline comparison, a control setup using manual irrigation without IoT automation was maintained under similar environmental conditions. This allowed comparative observation of system responsiveness and irrigation efficiency.
In parallel, anomaly detection routines triggered automated Telegram notifications if sensor malfunction, communication failure, or parameter deviation occurred. The logical flow and system interactions are illustrated in the system flowchart and block diagram described in the original methodology chapter.
Data Collection and Parameter Measurement
Data acquisition was performed continuously and automatically without manual intervention. The monitored parameters included soil moisture (%), soil temperature (°C), ambient temperature (°C), and relative humidity (%). All measured parameters and their operational thresholds are summarized in Table 3, while soil-specific testing outcomes are reported in Table 4.
Sensor calibration was conducted prior to deployment using a two-point calibration method: dry soil (0%) and fully saturated soil (100%) for moisture sensors, and comparison with a calibrated reference thermometer for temperature sensors. Calibration checks were performed periodically every three days to ensure measurement stability.
Sensor readings were time-stamped and systematically logged for subsequent analysis, allowing evaluation of temporal trends and system responsiveness. Additional system behavior during irrigation activation was documented and analyzed, with operational results presented in Table 6.
Data Analysis and Performance Evaluation
Data analysis focused on system accuracy, reliability, and stability, complemented by comparative evaluation against the control treatment. Sensor accuracy was evaluated by comparing system readings against calibrated reference instruments, with deviations quantified as absolute and percentage error.
Communication reliability was assessed by measuring notification delivery success and latency across multiple triggering events, as summarized in Table 5. System response time was calculated as the delay between threshold detection and actuation.
System stability was evaluated through prolonged continuous operation, during which uptime percentage, sensor consistency, and synchronization between LCD and mobile platforms were monitored.
Additionally, irrigation performance between the automated system and manual control was qualitatively compared to assess efficiency improvements. This multi-dimensional evaluation approach ensured comprehensive validation of the system’s operational readiness for real-world agricultural deployment (10).
Ethical Considerations
This study did not involve human participants or animal subjects and therefore did not require formal ethical approval. All experimental procedures were conducted in accordance with standard engineering research practices and posed no environmental or biological risk.
Results and Discussion
System Implementation and Overall Performance
The developed Internet of Things (IoT)-based soil quality monitoring system was implemented and tested under open-field experimental conditions for tomato cultivation. The physical realization of the system is presented in Figure 1, which illustrates the complete hardware assembly, including the NodeMCU ESP8266 microcontroller, soil moisture sensor, DS18B20 soil temperature sensor, DHT11 air temperature and humidity sensor, relay module, water pump, and LCD display. Figure 1 shows that all components were assembled according to the proposed system architecture and operated as an integrated unit during testing.
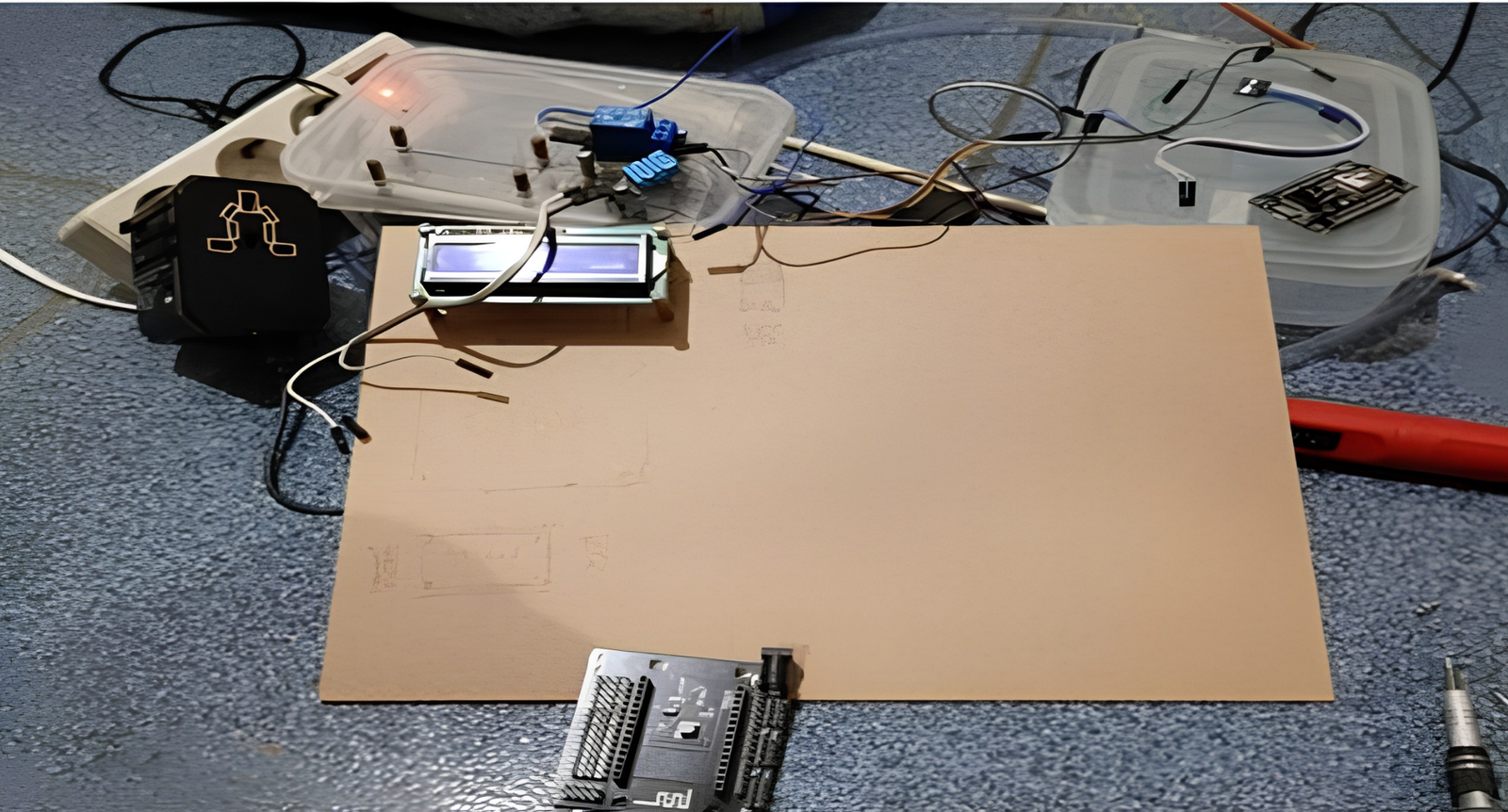
During operation, the system performed continuous monitoring without interruption under outdoor conditions. Data acquisition was conducted at a logging interval of approximately 1 min, allowing repeated observation of environmental parameters over time. Continuous real-time monitoring using IoT-based sensors is essential in agricultural systems to track dynamic environmental changes and support timely responses to crop conditions (11). No critical hardware malfunction was observed during the testing period; however, long-term durability under extended environmental exposure was not evaluated in this study.
Furthermore, Figure 2 depicts the operational mechanism of the system, showing the data flow from sensors to the microcontroller, followed by data visualization and notification through Blynk and Telegram. As illustrated in Figure 2, the system operates in a cyclic process consisting of sensor data acquisition, data processing, transmission via Wi-Fi, and user notification. The observed response time between sensor reading and data transmission to the user interface was approximately 3–5 s under stable network conditions.
This mechanism demonstrates the system’s capability to monitor environmental parameters continuously, process data in near real time, and execute automatic control actions based on predefined thresholds. IoT-based irrigation systems commonly utilize real-time sensor data and automated control mechanisms to regulate irrigation processes efficiently (12). However, the control logic applied in this system is based on fixed threshold values derived from literature rather than empirical optimization under site-specific conditions. Previous studies have highlighted that many conventional IoT irrigation systems rely on fixed or rule-based thresholds, which may limit adaptability to varying environmental conditions compared to more advanced adaptive or intelligent control approaches (13).
In addition, the use of low-cost sensors such as DHT11 and analog soil moisture probes introduces limitations in measurement precision and long-term stability. These sensors are adequate for detecting general trends and supporting threshold-based control but may produce variability under changing environmental conditions. Therefore, the system implementation at this stage provides a preliminary validation of functional integration within an IoT-based monitoring framework (8).
Environmental Parameter Monitoring and Baseline Results
The baseline monitoring results obtained during system operation are summarized in Table 3. This table presents representative environmental parameters measured by the system, including soil moisture percentage, soil temperature, and system-derived moisture status, along with their corresponding operational interpretation. Table 3 serves as an initial reference for evaluating system behavior under observed field conditions, particularly in relation to the threshold-based control logic used for irrigation activation and alert generation.
| No. | Parameter | LCD Symbol | Value | Unit | Description |
|---|---|---|---|---|---|
| 1 | Soil Moisture | SM | 43 | % | Indicates relatively dry soil condition |
| 2 | Soil Temperature | ST | 30.3 | °C | Soil temperature slightly above the optimal range but still tolerable |
| 3 | Moisture Status | Status | Dry | – | Automatically determined based on system threshold |
Analysis of Table 3 shows that the recorded soil moisture value (43%) falls below the predefined lower threshold (approximately 60%), indicating a relatively dry soil condition that triggers irrigation. The measured soil temperature (30.3 °C) is slightly above the commonly referenced optimal range for tomato cultivation but remains within a tolerable range for short-term exposure. The automatically generated moisture status (“Dry”) confirms that the system correctly interprets sensor data based on the programmed threshold logic.
Based on the available baseline data, soil moisture was recorded at 43%, which was 17 percentage points below the lower irrigation threshold of 60%, confirming the dry soil condition and the need for pump activation. The soil temperature was 30.3 °C, which was slightly above the commonly cited optimum range but still within a short-term tolerable condition for tomato cultivation. These values indicate that the system was able to identify environmental deviation from the programmed threshold and classify the soil condition accordingly.
Although Table 3 presents a single representative snapshot, continuous monitoring with a logging interval of approximately 1 min (as described in the previous subsection) revealed that soil moisture values typically fluctuated within the range of 43–47% prior to irrigation events. Soil temperature remained relatively stable within a narrow range (approximately 30–31 °C), reflecting the thermal buffering effect of soil, while air temperature and humidity exhibited observable diurnal variation, particularly during midday periods, which were consistently detected by the DHT11 sensor. Such temporal variability of environmental parameters is well documented in open-field agricultural systems and highlights the importance of continuous monitoring for accurate environmental assessment (14).
These observations indicate that the system is capable of capturing temporal variations in environmental parameters and providing real-time data for monitoring purposes. However, the statistical evaluation presented in Table 3 remains preliminary and limited to simple quantitative interpretation without advanced statistical modeling. Additionally, measurement uncertainty associated with low-cost sensors, particularly the DHT11, may influence the precision of recorded environmental values.
Therefore, the results presented in Table 3 should be interpreted as indicative of system functionality in environmental monitoring rather than as a comprehensive quantitative assessment of agricultural conditions. Further analysis incorporating time-series aggregation and statistical evaluation is required to strengthen the scientific interpretation of the collected data (2).
Soil Type Testing and Moisture Retention Characteristics
The performance of the monitoring system across different soil media is documented in Table 4. This table presents representative time-series observations of environmental parameters, including air temperature, air humidity, soil temperature, and soil moisture, along with pump activation status during system operation. The measurements shown in Table 4 were recorded at 5-minute intervals, allowing short-term observation of parameter changes under dry soil conditions.
| No. | Time | Soil Condition | Air Temperature (DHT11) | Air Humidity | Soil Temperature (DS18B20) | Soil Moisture | Pump Status |
|---|---|---|---|---|---|---|---|
| 1 | 15:04 | Dry Soil | 31.0 °C | 63% | 30.9 °C | 47% | Pump active |
| 2 | 15:09 | Dry Soil | 33.8 °C | 68% | 30.9 °C | 46% | Pump active |
| 3 | 15:14 | Dry Soil | 33.3 °C | 68% | 30.9 °C | 47% | Pump active |
Based on the three repeated observations shown in Table 4, the mean air temperature was 32.7 °C, with a range of 2.8 °C, indicating moderate short-term variation during the 10-minute observation period. Air humidity showed a mean value of 66.3%, with a range of 5%, suggesting a slight increasing trend from 63% to 68%. In contrast, soil temperature remained stable at 30.9 °C across all observations, showing no short-term fluctuation. Soil moisture values ranged from 46% to 47%, with a mean of 46.7% and low variability, indicating that the soil remained consistently below the predefined irrigation threshold of approximately 60%. This pattern confirms that the system correctly maintained the pump in an active state during the dry-soil condition. Although the statistical analysis is limited by the small number of recorded values presented in the table, the mean and range values provide a clearer quantitative indication of system responsiveness and environmental stability during testing. Further analysis using longer time-series data is recommended to evaluate broader trends, variability, and soil-specific moisture retention patterns.
Although Table 4 provides detailed temporal observations, the presented data represent a limited snapshot under dry soil conditions and do not fully capture the variability across different soil types (humus-rich, sandy, and mixed soils) over extended periods. Based on broader experimental observations, humus-rich soil generally retained moisture for longer durations, whereas sandy soil exhibited faster moisture decline following irrigation. However, these trends are not quantitatively summarized in Table 4, and no statistical comparison (e.g., mean moisture retention, rate of decline) was conducted.
The system was able to detect changes in soil moisture consistently and trigger irrigation accordingly, indicating functional sensitivity of the soil moisture sensor. Nevertheless, as the sensor is analog-based, its readings may be influenced by soil composition, density, and electrode condition, which introduces measurement variability.
These findings suggest that while the system can differentiate moisture behavior under varying conditions, the use of fixed moisture thresholds (60–80%) without soil-specific calibration may not be optimal for all soil types. Therefore, adaptive threshold adjustment based on soil characteristics is recommended for improving irrigation precision. Further studies incorporating longer observation periods and quantitative comparison across soil types are required to strengthen the analysis and support more robust conclusions.
Sensor Accuracy Verification and Measurement Reliability
Sensor accuracy verification results are visualized in Figure 3, which presents a comparison between sensor readings and reference measurement instruments, including a digital thermometer and a manual soil moisture tester. Figure 3 illustrates the consistency of sensor outputs relative to reference values across repeated measurements.
The DS18B20 sensor demonstrated relatively high accuracy in soil temperature measurement, with observed deviations consistently below ±1 °C when compared to the reference thermometer. This level of deviation falls within acceptable limits for environmental monitoring applications and indicates stable sensor performance during the testing period. Repeated measurements across multiple observation points showed minimal fluctuation, suggesting good measurement consistency.
In contrast, the DHT11 sensor exhibited lower precision, with observed deviations in the range of approximately 3–5% for humidity and ±2 °C for temperature. These deviations are consistent with the manufacturer’s specifications and reflect the limitations of low-cost sensing devices. Although this level of accuracy is lower than that of higher-grade sensors, the DHT11 remains adequate for detecting general environmental trends and supporting threshold-based control logic. However, its performance may be affected by rapid environmental changes and prolonged exposure to outdoor conditions.
The soil moisture sensor demonstrated consistent responsiveness to changes in soil water content, particularly during transitions between dry and irrigated states. Calibration was performed using a two-point reference method, consisting of dry soil (0%) and fully saturated soil (100%), to normalize analog readings into percentage values. While this approach improves interpretability, it does not fully account for variability caused by soil composition, salinity, and sensor electrode degradation.
It should be noted that sensor validation in this study was conducted through repeated measurements under experimental conditions; however, detailed statistical analysis (e.g., standard deviation, confidence intervals, or error propagation) was not performed. Therefore, the results presented in Figure 3 should be interpreted as indicative of measurement reliability rather than a comprehensive metrological validation.
Overall, the findings suggest that the selected sensors are adequate for prototype-level implementation and real-time monitoring applications, particularly in low-cost IoT systems. Nevertheless, measurement uncertainty remains a limiting factor, and the integration of higher-precision sensors is recommended for applications requiring more rigorous quantitative analysis (4, 15).
Automated Irrigation Control and Pump Activation Behavior
The operational behavior of the automated irrigation system is further explained through Table 5 and Table 6. Table 5 presents selected monitoring outcomes, including environmental parameters, system status, and operating mode, while Table 6 summarizes parameter values recorded during pump activation events.
| No. | Parameter | Value | Unit | Status/Description |
|---|---|---|---|---|
| 1 | Soil pH | 4.98 | – | Too acidic, below the ideal range (6.0–6.8) for tomato growth |
| 2 | Soil Temperature | 28 | °C | Within the ideal range for root activity and nutrient absorption |
| 3 | Air Humidity | 80 | % | Relatively high but still supports tomato plant growth |
| 4 | Air Temperature | 29 | °C | Ideal for photosynthesis and vegetative development |
| 5 | Pump Status | ON | – | Pump activated due to low soil moisture level; system responded automatically |
| 6 | Operating Mode | Automatic | – | System operates in automatic mode without manual control |
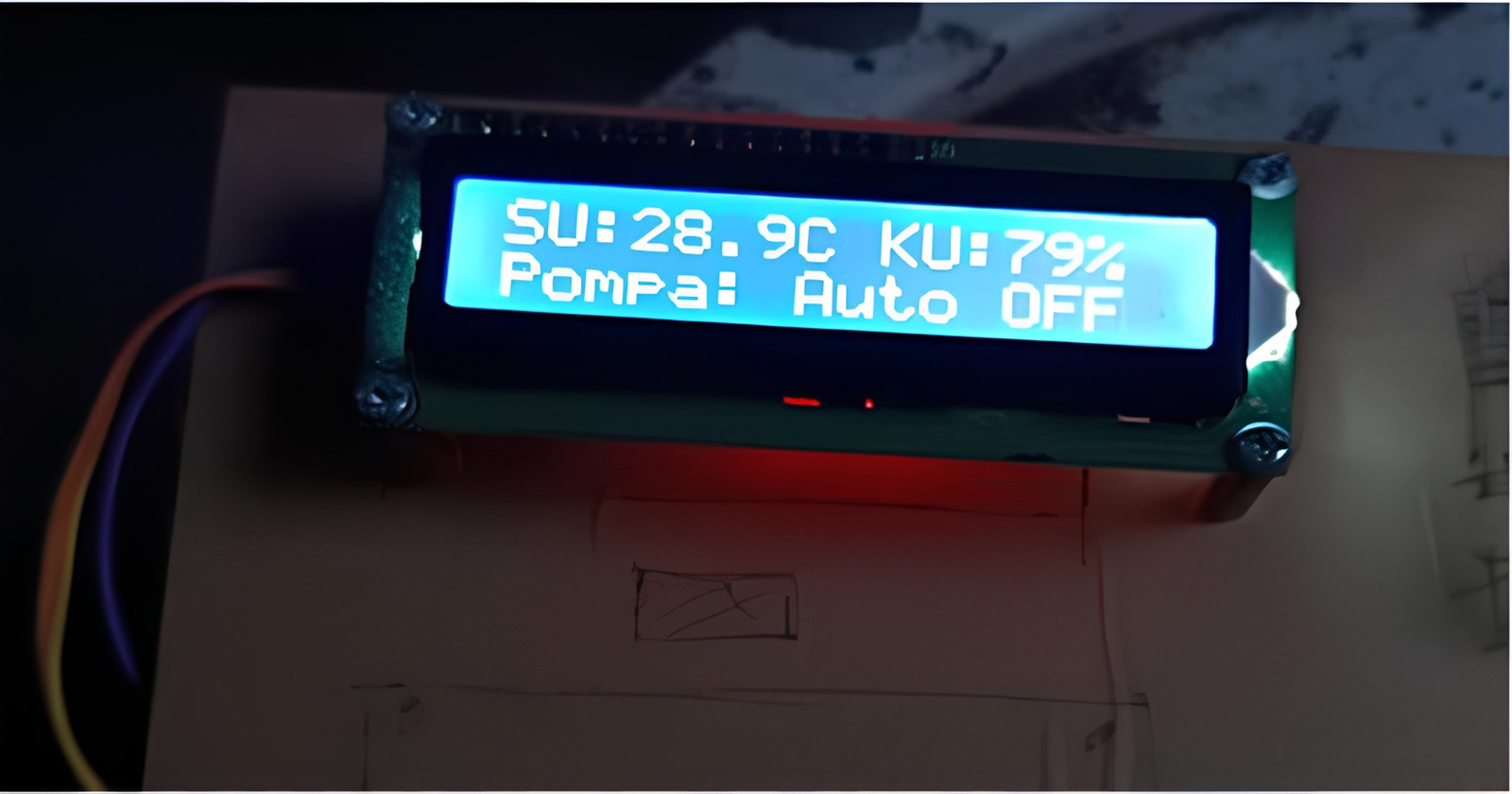
| No. | Parameter | Value | Unit | Description |
|---|---|---|---|---|
| 1 | Air Temperature (AT) | 29.6 | °C | Ambient temperature around the plant; ideal for tomato growth |
| 2 | Air Humidity (AH) | 67 | % | Air humidity level that supports a favorable microclimate for tomato plants |
| 3 | Pump Status | Auto ON | – | Pump activated automatically because environmental parameters required irrigation |
Analysis of Table 6 indicates that pump activation occurred when soil moisture levels dropped below the predefined threshold of approximately 60%, as defined in the system control logic. During activation events, environmental conditions such as air temperature (29.6 °C) and humidity (67%) remained within ranges generally associated with tomato cultivation. The pump was automatically deactivated when soil moisture exceeded approximately 80%, indicating proper functioning of the closed-loop threshold-based control system.
The data presented in Table 5 show that the system operated in fully automatic mode, with consistent responsiveness to environmental conditions. However, it is important to clarify that pump activation in this system is primarily governed by soil moisture thresholds rather than soil pH values. The inclusion of soil pH (4.98) in Table 5 provides contextual information about soil condition but is not directly linked to irrigation control in the implemented logic. Such threshold-based irrigation control using soil moisture sensors is widely applied in IoT-based agricultural systems due to its simplicity and low computational requirements (16).
Although the system demonstrated consistent activation and deactivation behavior, the applied control strategy is based on fixed threshold values derived from literature rather than empirical optimization under specific soil and environmental conditions. As a result, the irrigation response may not be fully adaptive to variations in soil type, plant growth stage, or climatic fluctuations. Previous studies have reported that fixed-threshold irrigation approaches often lack flexibility and may lead to suboptimal water management compared to adaptive or data-driven control strategies that account for environmental variability and crop requirements (17).
Furthermore, while the system ensures automated water delivery based on sensor input, its effectiveness in improving irrigation efficiency or plant performance was not quantitatively evaluated in this study. No direct measurements of plant growth, yield, or water-use efficiency were conducted; therefore, conclusions regarding agricultural impact should be interpreted with caution.
Overall, the results from Table 5 and Table 6 demonstrate that the system is capable of implementing rule-based automated irrigation with stable operational performance. However, further development incorporating adaptive control algorithms and experimental validation against agronomic outcomes is required to enhance system effectiveness and scientific robustness (10). Although a control setup with manual irrigation was included, the comparison was limited to qualitative observation, and no quantitative benchmarking metrics were derived.
Data Visualization, Synchronization, and User Accessibility
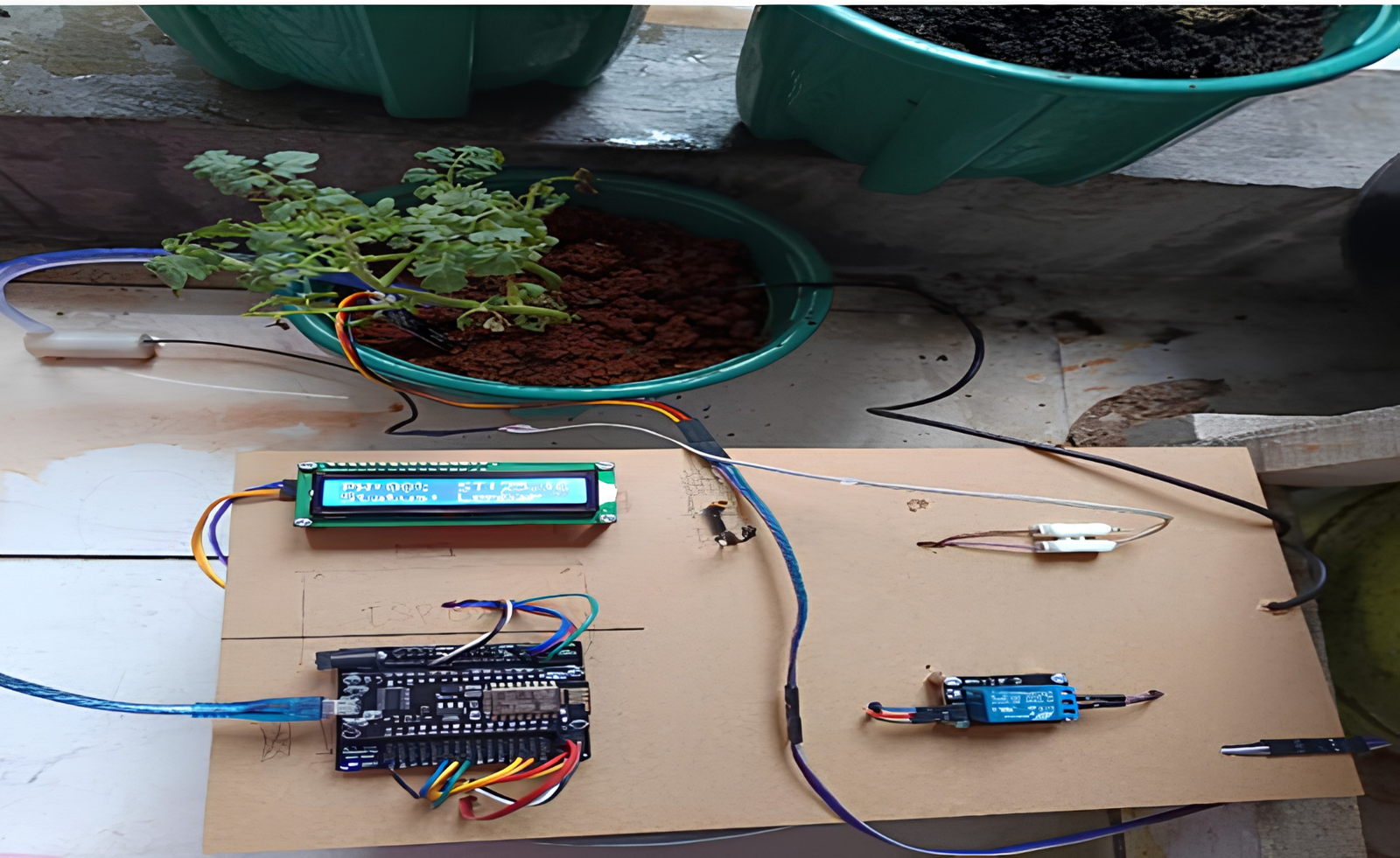
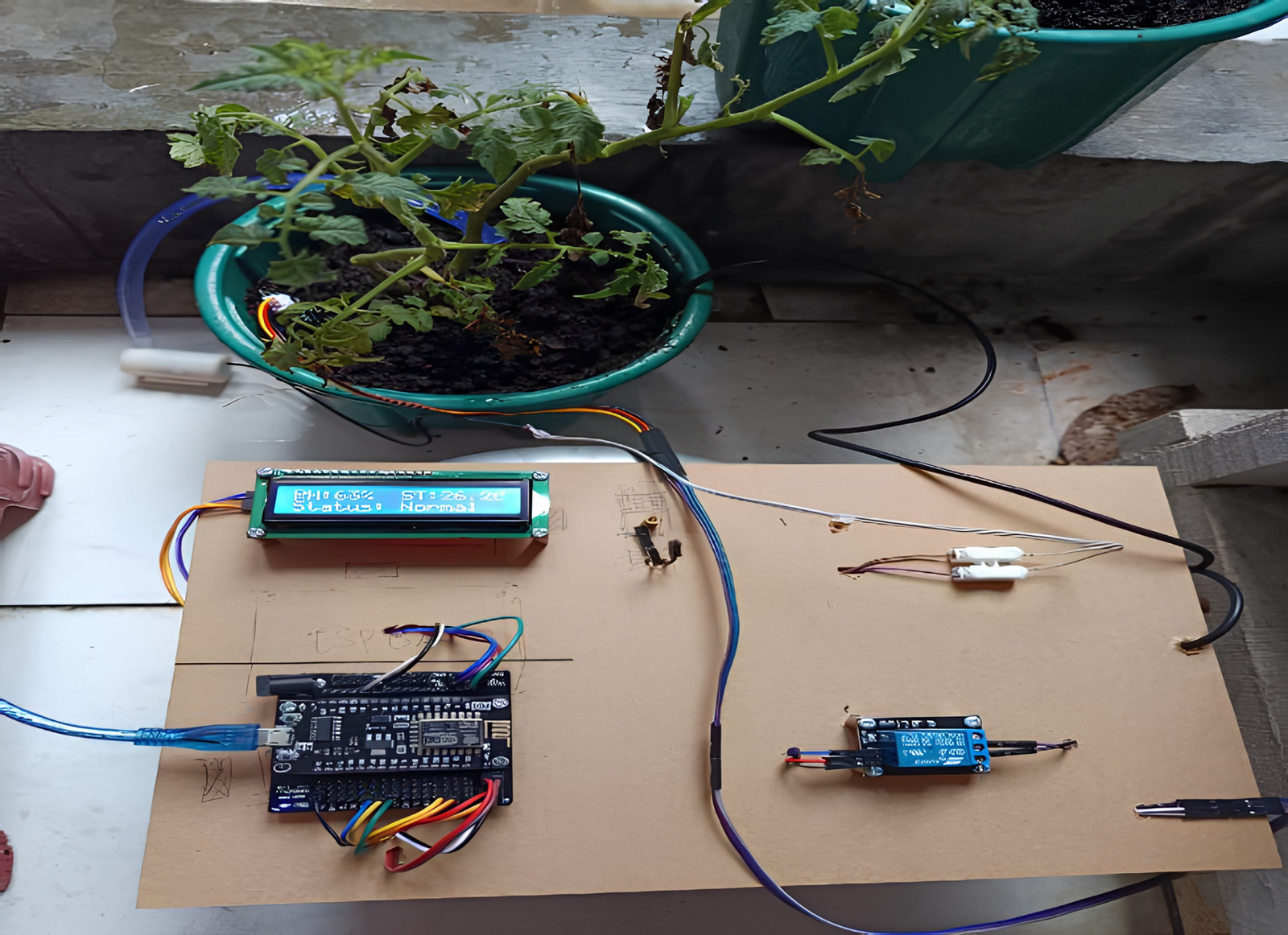
Real-time data visualization and synchronization across multiple interfaces are illustrated in Figure 4 and Figure 5. Figure 4 shows the system testing setup under field conditions, while Figure 5 presents the device during operation, including hardware configuration and sensor placement.
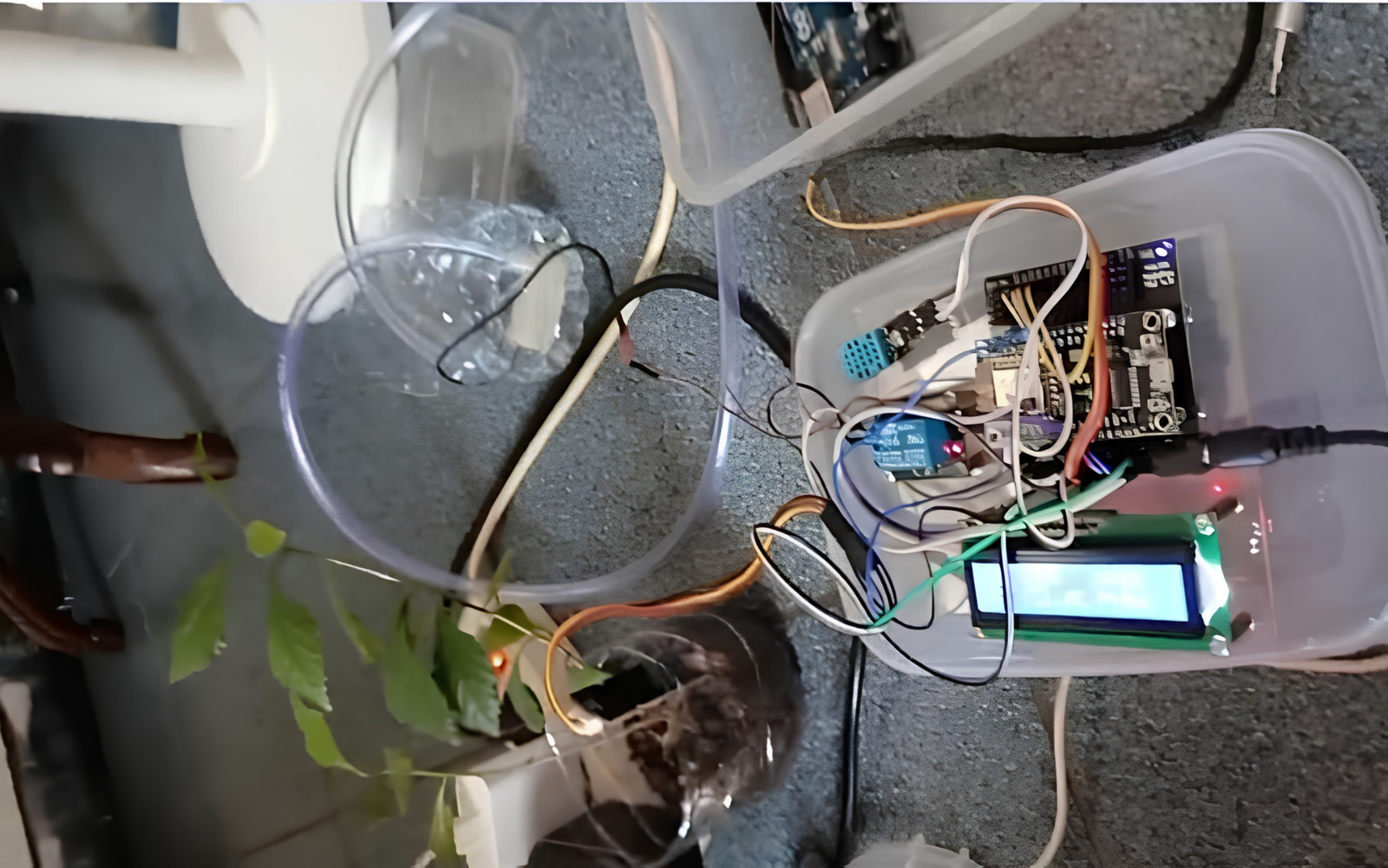
Sensor data were displayed locally via the LCD and transmitted to the Blynk platform for remote visualization in both graphical and numerical formats. In addition, Telegram notifications were used to deliver alerts based on predefined threshold conditions. Synchronization between the LCD display, Blynk interface, and Telegram notifications was observed to be consistent during system operation. Similar architectures integrating IoT platforms and mobile-based notification systems have been widely adopted to enable real-time data visualization and remote monitoring in smart agriculture applications (18).
Based on observational testing, the average delay between data acquisition and visualization on the mobile interface was approximately 3–5 s under stable network conditions. No significant discrepancies between locally displayed data and remotely transmitted values were observed during the monitoring period. However, latency measurements were not systematically quantified across all time points, and network stability may influence performance under different field conditions.
The ability to access environmental data remotely via smartphone supports timely monitoring and user awareness of environmental changes. Nevertheless, the evaluation in this study is limited to system functionality, and user interaction aspects such as usability testing or response effectiveness were not formally assessed (19).
System Stability and Long-Term Operation
Extended operation testing demonstrated that the system maintained stable performance during the observation period. Continuous system operation was conducted over approximately 14 d with repeated data acquisition cycles, during which no critical system failures such as crashes, unexpected resets, or complete communication loss were observed.
Sensor readings remained consistent within expected ranges, and data transmission to both the Blynk platform and Telegram notifications continued without major interruption. Reliable long-term operation and system stability are key performance indicators in IoT-based monitoring systems, particularly in agricultural deployments where continuous data acquisition is required (20).
However, it is important to note that long-term system stability beyond the experimental duration was not evaluated. Factors such as sensor degradation, environmental exposure (e.g., moisture, temperature fluctuations), and power supply variability may affect system reliability over extended deployment periods.
Therefore, while the results demonstrate stable operation within the testing timeframe, further long-term evaluation under diverse environmental conditions is required before confirming system robustness for continuous real-world agricultural applications.
Implications, Limitations, and Future Perspectives
The results presented in Tables 3–6 and Figures 1–5 indicate that the proposed IoT-based system is capable of real-time environmental monitoring, threshold-based irrigation control, and remote data visualization. However, these findings primarily demonstrate system functionality rather than direct agricultural impact, as no plant growth or yield measurements were conducted. Several limitations should be noted, including the use of low-cost sensors with limited accuracy, the application of fixed (non-adaptive) thresholds, and the limited statistical evaluation based on representative observational data. Future work should focus on improving sensor precision, applying adaptive control methods, implementing larger-scale field validation, and conducting experiments that evaluate plant response and irrigation efficiency.
Conclusion
This study presents the design and implementation of an IoT-based soil quality monitoring system for open-field tomato cultivation, integrating real-time sensing, automated irrigation control, and remote monitoring through mobile platforms. The results demonstrate that the system is capable of measuring environmental parameters (soil moisture, temperature, humidity, and pH) and performing threshold-based irrigation control with stable operation during the testing period.
The findings indicate that the system functions as a feasible and low-cost prototype for environmental monitoring and automated irrigation in open-field conditions. However, this study focuses on system validation rather than agricultural performance evaluation. No direct measurements of plant growth, yield, or irrigation efficiency were conducted; therefore, the impact of the system on cultivation outcomes cannot be conclusively determined.
Several limitations should be acknowledged, including the use of low-cost sensors with limited precision, the application of fixed (non-adaptive) control thresholds, and limited statistical and agronomic validation. Future work should focus on long-term field deployment, improved sensor accuracy, adaptive control implementation, and experimental studies evaluating plant response and irrigation efficiency to support broader agricultural applications.
Declarations
Conflict of Interest
The authors declare no conflicting interest.
Data Availability
All data generated or analyzed during this study are included in this published article.
Ethics Statement
Ethical approval was not required for this study.
Funding Information
The author(s) declare that no financial support was received for the research, authorship, and/or publication of this article.
References
- Cahyani MP. IoT dalam smart farming 4.0 untuk upaya tingkatkan efesiensi agribisnis. Teknois J Ilm Teknol Inf dan Sains. 2023;3(2):154–190.
- Prasetyo Tulodo R, Ujianto NT, Budiraharjo E, Hapsari Y. Pengembangan Sistem Pendeteksi Hujan Berbasis Internet of Things (IoT) dengan Simulasi Wokwi. Jureng. 2025;14(2):196-202. doi: https://doi.org/10.24905/jureng.v14i2.29
- Jones HG. Plants and Microclimate. Cambridge University Press; 2013. doi: https://doi.org/10.1017/cbo9780511845727
- Ginanjar R, Candra R, Kembaren SB. Kendali dan pemantauan kelembaban tanah, suhu ruangan, cahaya untuk tanaman tomat. infokom. 2018;23(3):166-174. doi: https://doi.org/10.35760/ik.2018.v23i3.2372
- Wolfert S, Ge L, Verdouw C, Bogaardt MJ. Big Data in Smart Farming – A review. Agricultural Systems. 2017;153:69-80. doi: https://doi.org/10.1016/j.agsy.2017.01.023
- Ayaz M, Ammad-Uddin M, Sharif Z, Mansour A, Aggoune EHM. Internet-of-Things (IoT)-Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access. 2019;7:129551-129583. doi: https://doi.org/10.1109/access.2019.2932609
- Rajak P, Ganguly A, Adhikary S, Bhattacharya S. Internet of Things and smart sensors in agriculture: Scopes and challenges. Journal of Agriculture and Food Research. 2023;14:100776. doi: https://doi.org/10.1016/j.jafr.2023.100776
- Hendrian Y, Saefudin RM, Meltha N. Pemanfaatan Internet of Things untuk otomatisasi penyiraman tanaman tomat dan pemantauan kelembapan tanah. Akrab Juara J Ilmu-Ilmu Sos. 2021;6(5):104–118.
- Yunseop Kim, Evans R, Iversen W. Remote Sensing and Control of an Irrigation System Using a Distributed Wireless Sensor Network. IEEE Trans. Instrum. Meas. 2008;57(7):1379-1387. doi: https://doi.org/10.1109/tim.2008.917198
- Tumanggor SU, Purnama W, Ritonga AA. Rancang bangun Internet of Things (IoT) penyiraman tanaman hidroponik. J Rekayasa Sist dan Teknol Inf. 2024;8(8):108–119.
- Pascoal D, Silva N, Adão T, Lopes RD, Peres E, Morais R. A technical survey on practical applications and guidelines for IoT sensors in precision agriculture and viticulture. Sci Rep. 2024;14(1). doi: https://doi.org/10.1038/s41598-024-80924-y
- Morchid A, Jebabra R, Khalid HM, El Alami R, Qjidaa H, Ouazzani Jamil M. IoT-based smart irrigation management system to enhance agricultural water security using embedded systems, telemetry data, and cloud computing. Results in Engineering. 2024;23:102829. doi: https://doi.org/10.1016/j.rineng.2024.102829
- Bushnag A, Chaabane SB, Harrabi R, Alharbi LA, Alshmrani M, Abuzneid S. Smart agriculture: IoT-Based smart irrigation with advanced fuzzy logic control. Expert Systems with Applications. 2026;299:130168. doi: https://doi.org/10.1016/j.eswa.2025.130168
- Gaikwad SV, Vibhute AD, Kale KV, Mehrotra SC. An innovative IoT based system for precision farming. Computers and Electronics in Agriculture. 2021;187:106291. doi: https://doi.org/10.1016/j.compag.2021.106291
- Nurhasanah R, Savina L, Nata ZM, Zulkhair I. Design and Implementation of IoT based Automated Tomato Watering System Using ESP8266. J. Phys.: Conf. Ser. 2021;1898(1):012041. doi: https://doi.org/10.1088/1742-6596/1898/1/012041
- Padiachy V, Prakasan M, Prasad KA, Kumar E, Nand A, Kumar P, et al. IoT based Smart Irrigation System for Sustainable Agriculture. Dordrecht: Atlantis Press International BV; 2025. doi: https://doi.org/10.2991/978-94-6463-870-7_16
- Liu X, Zhao Z, Rezaeipanah A. Intelligent and automatic irrigation system based on internet of things using fuzzy control technology. Sci Rep. 2025;15(1). doi: https://doi.org/10.1038/s41598-025-98137-2
- Sahoo J, Barrett K. Internet of Things (IoT) Application Model for Smart Farming. SoutheastCon 2021. 2021:1-2. doi: https://doi.org/10.1109/southeastcon45413.2021.9401845
- Mujahid A, Jannah M, Salahuddin S, Taufiq T. Penyiram Tanaman Otomatis menggunakan Sensor pH Tanah dan Sensor Kelembaban Tanah untuk Tanaman Tomat Berasis IoT. Jaei. 2023;9(2):34-38. doi: https://doi.org/10.19184/jaei.v9i2.32623
- Dina AS, Manivannan D. Intrusion detection based on Machine Learning techniques in computer networks. Internet of Things. 2021;16:100462. doi: https://doi.org/10.1016/j.iot.2021.100462